Global: Define Spherical UCS
Description
Defines a spherical coordinate system (UCS) (see Global: Define UCS).
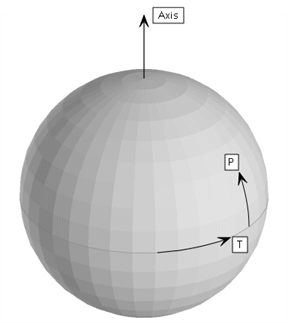
Spherical coordinate systems use the coordinates R, T and P (radius, theta and phi) to define the position of a point.
R is a distance measured from the origin of the spherical UCS, whereas T and P are angles.
A rotation about the axis of the spherical UCS, using the right-hand rule, defines the direction of positive T.
At any location (R,T,P), the respective R, T and P direction vectors are mutually perpendicular.
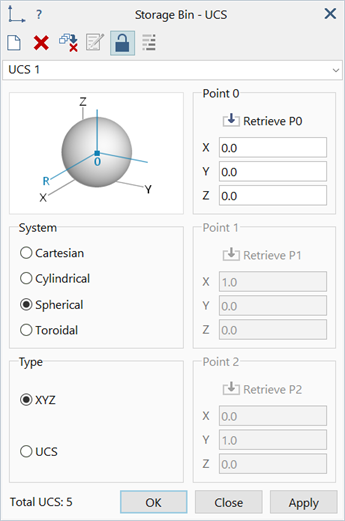
Dialog
Type
Method used to position and orientate the spherical UCS.
-
XYZ
A single point (Point 0) defines the origin of the spherical UCS.
The axis of the UCS is parallel to the global Z axis.
The points (R,0,0) on the UCS are located on a line parallel to the X direction of the global XYZ coordinate system. At all points along this radial line, the T direction is parallel to the global Y axis, and the P direction is parallel to the global Z axis.
Point 1 and Point 2 are implicitly defined.
-
UCS
Three points (Point 0, Point 1 and Point 2) define an arbitrarily orientated spherical UCS.
The origin is located at Point 0.
The axis of the UCS is directed from Point 0 to Point 1.
The points (R,0,0) on the UCS are located on a line passing through the origin of the UCS, perpendicular to the axis of the UCS, and on the plane defined by the three points. The positive direction of this radial is generally directed from the origin towards Point 1.
Point 0 / Point 1 / Point 2
Three points used to position and orientate a spherical UCS.
Coordinates of points may be retrieved from the model by clicking a node, vertex or grid point, or by explicitly typing the values into the edit boxes.
See Also